ECE 477: Digital Systems Senior Design Last Modified: 07-29-2022
Initial Project Proposal
Year: 2022 Semester: Fall Project Name: Return Rover
Creation Date: 05-05-2022 Last Modified: 07-29-2022
Team Members (#1 is Team Leader):
Member 1: Andres Barrera Email: barrer10@purdue.edu
Member 2: Amir Issa Email: issa9@purdue.edu
Member 3: Christine Fang Email: fang245@purdue.edu
Member 4: Waewta Saw Email: wsaw@purdue.edu
1.0 Description of Problem:
In 2017, there were 4,194 search and rescue incidents in United States parks alone, according to the National Park Service. Out of this sample population, 36.62% of cases involved ill or injured subjects. With an ever increasing population of outdoors explorers, safety in national parks and reserves continues to be a pressing issue. Common SAR (search and rescue) concerns include losing track of the trails in lesser marked routes, incapacitation due to major injury, and the inaccessibility of location and cellular services due to inclement weather and the remote nature of the great outdoors.
These concerns affect a large and increasing population of outdoors activity participants, including hikers, skiers, and cyclists. As a target audience of search and rescue concerned adventurers, mountain hiking is a very popular activity with a large group of participants worldwide. In a joint article from RunRepeat and AllTrails, two companies on the forefront of the hiking industry, it was reported that 2020 saw a boom in hiking with over 4.7 million electronically recorded hikes. This great volume of hiking trips came from over 950,000 online users. With an average hiking pace of 2 miles per hour (The New York Times), over 9.4 million miles can be estimated to have been traversed in dedicated hiking trips over the year. Safety concerns every single hiker within the hiking sample of the adventuring population. Devising a way to provide search and rescue efficiency will save lives, time, and important resources.
2.0 Proposed Solution:
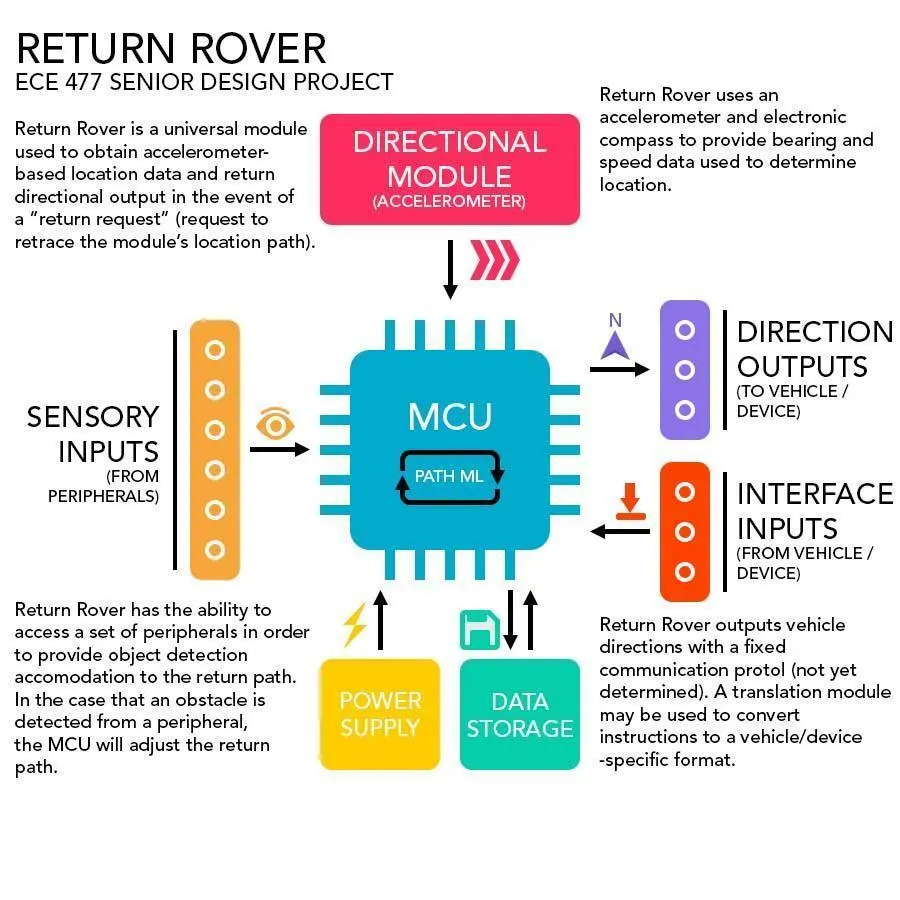
Our proposed solution to outdoors safety preparedness is a small emergency response module, capable of tracking and retracing a hiker’s steps in the case of an emergency. The module is to be integratable with hand held devices as well as modern vehicles such as drones and terrestrial robots. This is done by using an easily translated protocol to communicate directional information.
The device will utilize a user’s bearing and speed to keep track of location. As a method of location tracking requiring minimal infrastructure (satellites, towers, etc), this system may be more accurate or improve the accuracy of modern GPS. It will also solve the issue of navigating where GPS signals are inaccurate or not present (poor weather conditions, obstacle-dense terrain, etc.). In addition to this, peripheral sensor configuration will determine whether obstacles are present in the case of vehicular integration. Obstacle detection will alter the communicated path sent to the vehicle and return the vehicle or user to origin by adapting to a changing or obstacle-filled environment.
Figure 2.0.1 - Return Rover Infographic
[a]
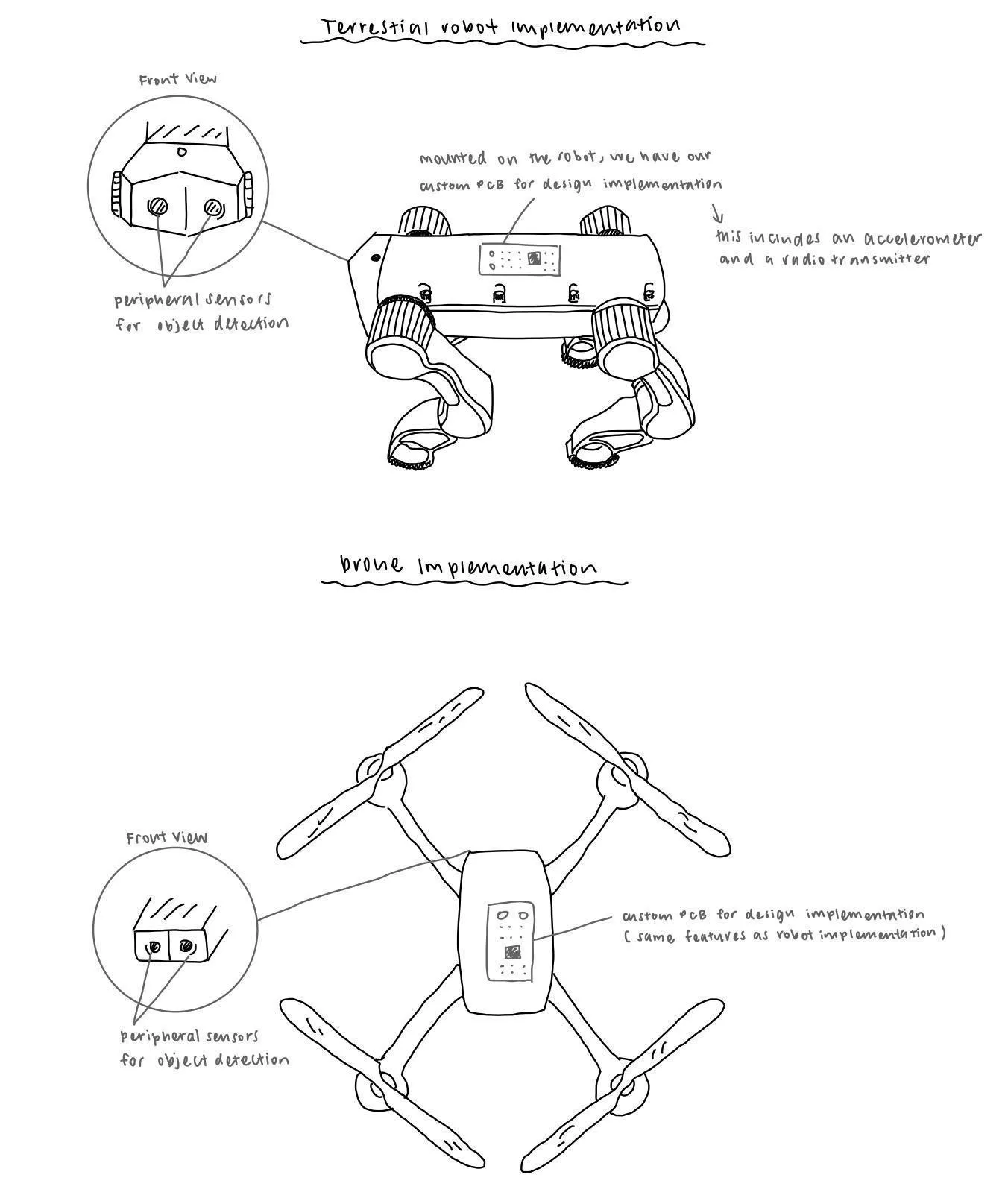
See Figure A.1 in the Appendix for figures showing Return Rover vehicle implementation.
3.0 ECE477 Course Requirements Satisfaction
3.1 Expected Microcontroller Responsibilities
This project will consist of a microcontroller chip with several peripherals connected via a printed circuit board. Our proposed project will require the microcontroller to interface various inputs to obtain directional information.
The microcontroller’s responsibilities are to monitor its peripherals, which include the magnetometer and a hall effect sensor, more specifically a wheel speed sensor.. It then has to convert those measurements into a digital signal through an analog-to-digital converter (ADC). The sensor peripherals will be connected to the microcontroller and transmit data to the microcontroller via its GPIO, ADC and SPI interface pins. The microcontroller will then utilize the data obtained to repeat steps done during our initial drive to a location.
3.2 Expected Printed Circuit Responsibilities
The printed circuit board is responsible for providing electrical connection to the microcontroller and its peripherals. It is expected to incorporate a microcontroller, power supply, battery management, and peripheral sensors. These sensors include, but are not limited to, a magnetometer and wheel speed sensor. Along with managing power and sensors, the printed circuit board can also utilize external flash memory for more data storage. This can be accomplished with the use of a SD card interface. The PCB also provides mechanical support and structure to the electrical components of the circuit. The PCB will also contain a battery management system to provide power to the device. Any additional functionality will be documented as we progress with the course.
4.0 Market Analysis:
The target market for this product are hikers and participants in other outdoors activities. As stated in section 1.0, there is a huge market in hiking alone with over 4.7 million hikes electronically recorded in 2020. Although some hiking enthusiasts keep to more frequently traversed and safer trails, many enjoy venturing into less traveled territory. These outdoor enthusiasts make up the majority of our target audience.
In addition to serving civilian enthusiasts, this device may have industrial and military purposes. This includes providing accurate location data in the case of GPS scrambling, location hacking, and the lack of a reliable GPS signal. Using accelerometer data to provide precise position information is very relevant to modern technologies which automate the world around us. For example, the Starship delivery robots require precise location and sensory data to navigate food delivery zones.
5.0 Competitive Analysis:
Our solution lies commercially in a niche location between GPS locators and other location based services (LBS). The competitors in this landscape and their key attributes are listed below:
Table - Competitive Landscape Analysis | |||||
LSB | Description | Location Accuracy | Required Infrastructure | Obstruction Sensitivity | Outdoor Usage |
GPS | GPS uses satellites to triangulate a signal and determine location. | Location is relatively accurate to approx 10 m. (MEDIUM) | Requires unobstructed reach of at least four satellites. (MEDIUM) | Easily obstructed by buildings, weather, etc. (HIGH) | Commonly used outdoors. (HIGH) |
Cell of Origin | Uses cell service to generalize location with the location of the closest cell tower. | Location is not very accurate, as cell tower density is proportional to population density. Approx 50 m to several km. (LOW) | Requires high cell tower density. (HIGH) | Obstructed by buildings / edifices. (MEDIUM) | Commonly used outdoors. (HIGH) |
WiFi Positioning System | Uses WiFi hotspots to triangulate location. | High location accuracy for indoor spaces. (HIGH) | Requires indoor WiFi hotspots. (HIGH) | Obstructed by walls and less accessible in other rooms. (HIGH) | Not applicable to the outdoors. (LOW) |
Time of Flight | Uses the speed at which photons travel between a change in location to determine speed and new location. | High accuracy at approx 2 - 4 m. (HIGH) | No infrastructure required. (LOW) | Very little obstruction sensitivity, as it does not require sending a signal via waveform. (LOW) | Can be used outdoors (HIGH) |
Our Proposed Solution | Using accelerometer data and clock to generate velocity and time traveled and calculate location. | Expected High accuracy, as it does not rely on sending and receiving external signals. Will be as accurate as the accelerometer is. (HIGH) | No infrastructure required. (LOW) | Very little obstruction sensitivity, as it does not require sending a signal via waveform. Environmental factors such as sunlight may affect resolution. (LOW) | Can be easily applied to outdoor locomotion. (HIGH) |
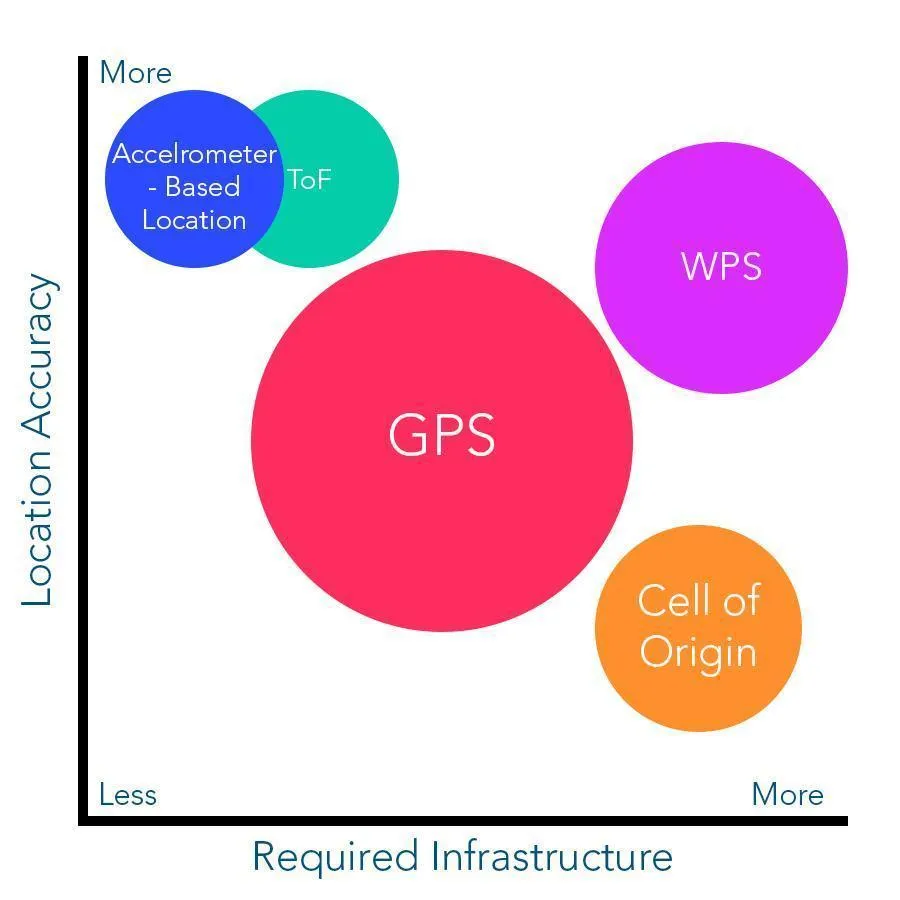
Two critical success drivers in this industry are “Location Accuracy” and “Required Infrastructure”. The following competitive landscape plots the competing technology listed above based upon these two factors:
Figure 5.0.1: Competitive Landscape Plot
As shown above, our solution is optimal for the two key drivers of search and rescue location. Location accuracy determines how effective the solution will be. Meanwhile, infrastructure directly correlates to remote flexibility, cost, and sensitivity to changes in landscape.
Our product competitors mainly include digital GPS systems and old mechanical technology such as compasses. Old mechanical systems fail to provide total accuracy and efficiency and instead rely on human decisions, unlike the Return Rover. Meanwhile, GPS systems are prone to fail in unfavorable weather and intense landscape conditions. These technologies are thus often insufficient in search and rescue situations.
5.1 Preliminary Patent Analysis:
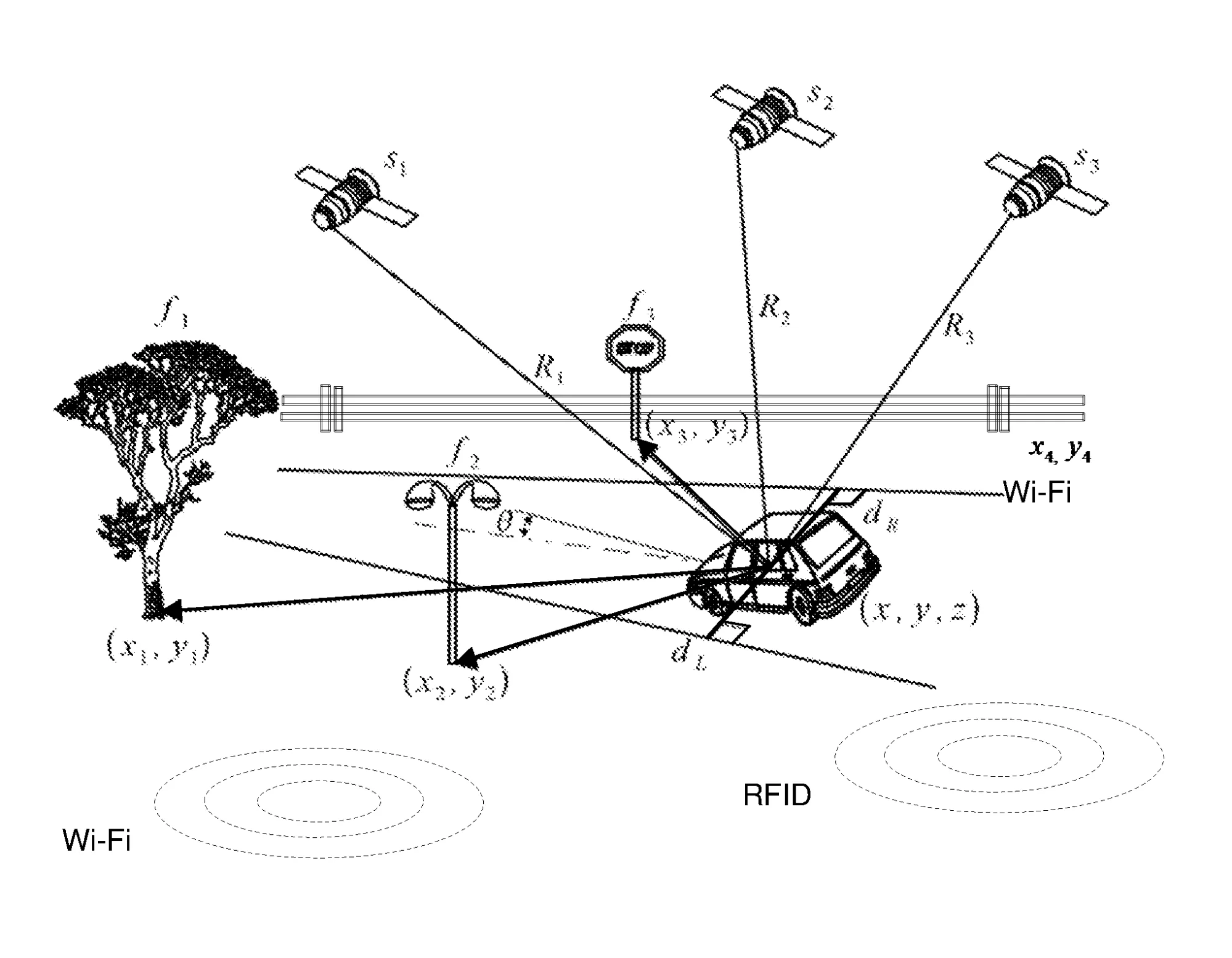
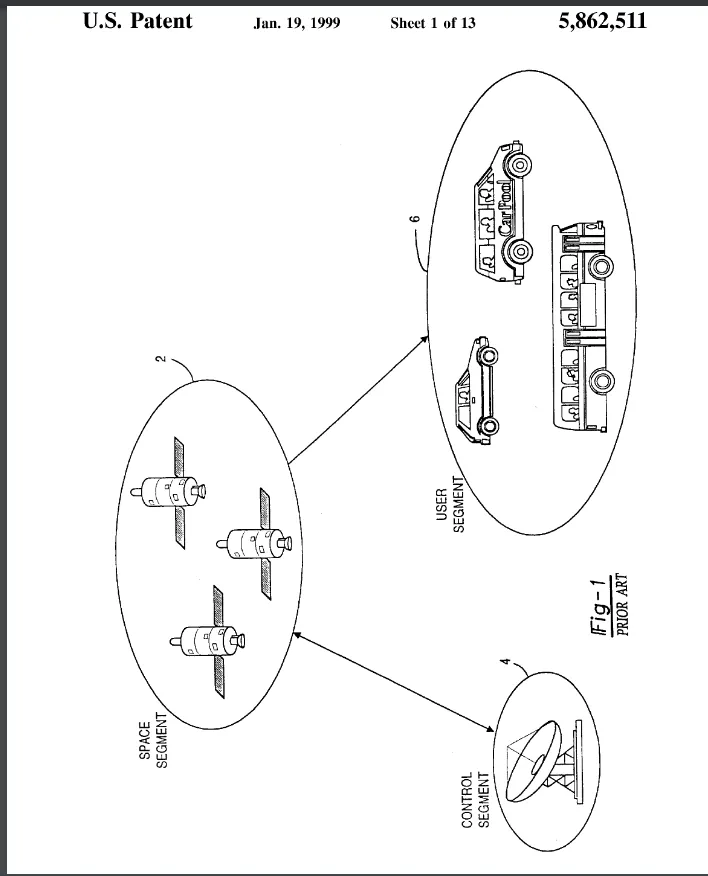
5.1.1 Sensor-aided vehicle positioning system:
This patent describes a positioning system that utilizes GPS data to localize a vehicle on a digital map. Along with GPS data, other sensors are used to measure bearing and distance data which aids the vehicle in finding its position. The position of the vehicle is represented as “a function of linearizing raw measurement data and the sensor measurement data as derived by a Jacobian matrix and normalized measurements, respectively”.
Figure 5.1.1: Diagram of external objects sensed by system (S. Zeng).
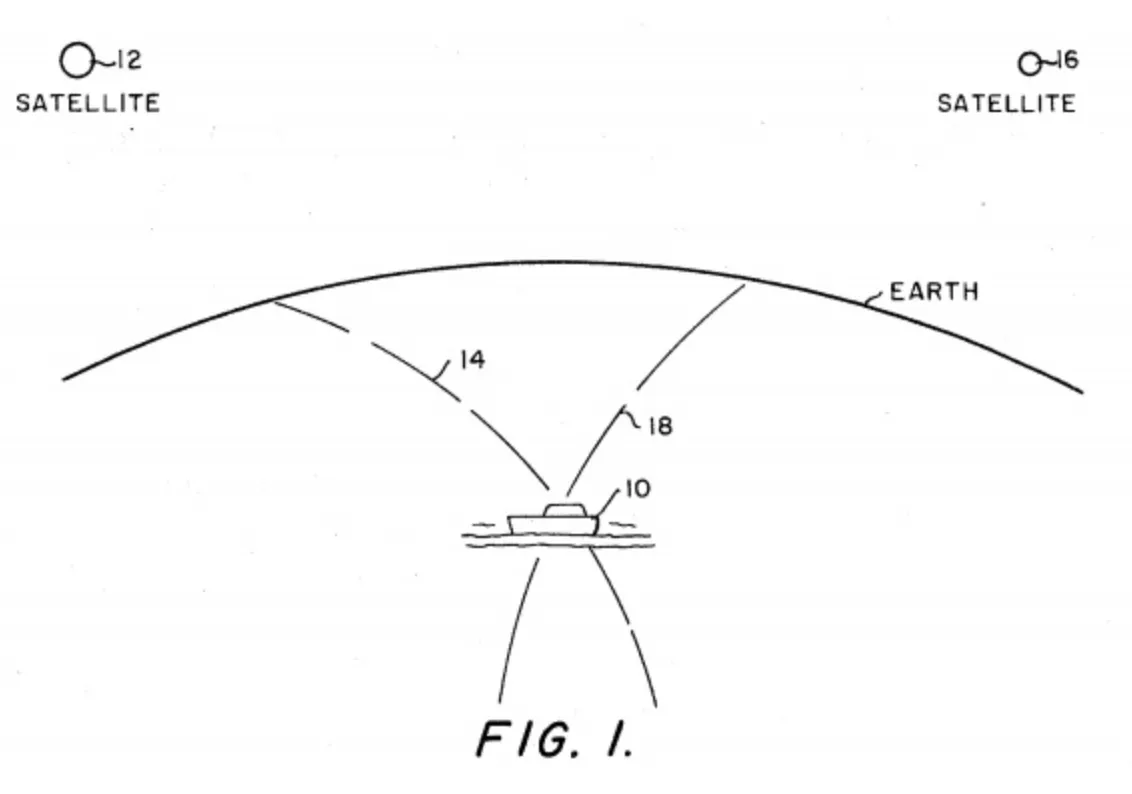
5.1.2 Outdoor accurate positioning navigation method and device, electronic equipment and storage medium:
This patent describes a device to continuously acquire inertial navigation data and orientation information to provide precision navigation under various complex road conditions. This patent is likely for full-sized vehicles instead of smaller drones. The utilization of continuously acquired inertial navigation data provides accurate positioning information in real time since it does not need to be transmitted thereby avoiding problems that can arise in signal transmission.
Figure 5.1.2: Diagram of a Navigation System and Passive Ranging Techniques
5.1.3 Vehicle positioning method and system:
This patent describes a device that utilizes sensors other than GPS to improve accuracy of GPS positioning. An inertial measurement unit (IMU) module, a camera module, and a laser module are used to gather data that will improve positioning accuracy of GPS. The camera module creates a preliminary position in the environment from a road image. The laser module is used to create a three-dimensional reconstruction of the local environment using 3D point cloud data. These data are used to improve the positioning accuracy of the GPS module.
Figure 5.1.3 - Example of Vehicle Position Enhancement
5.2 Commercial Product Analysis:
There are many commercial products that exist which align with the goal of our project. Listed below are three products with aspects that tie with this goal.
5.2.1 Garmin Montana 700i GPS:
There are many commercial Global Positioning System(GPS) devices, but will use the Garmin Montana 700i model as an example. GPS functions by using a network of satellites and receivers to determine the exact details of a location on Earth. The Montana 700i can be used for on and off road navigation with a variety of features such as inReach for messaging the Emergency Response Coordination Center, and inReach weather forecast. Besides these features, the advantages of having a GPS is that when someone is lost, they are able to get directions by entering a destination point. Cons of GPS is that they use satellites to determine location, which is susceptible to location hacking, especially for military use.
Figure 5.2.1.1 - Garmin Montana 700i GPS
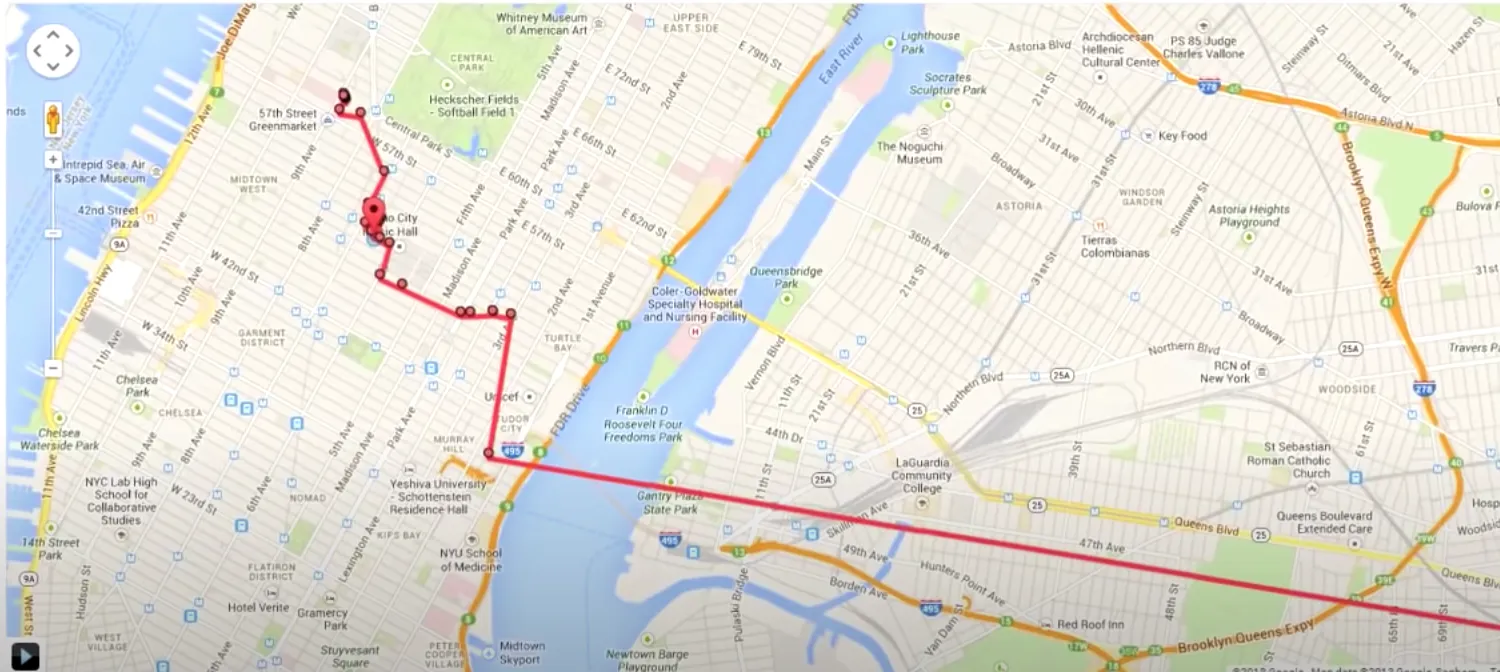
5.2.2 Google Maps Location History:
When this feature is enabled, Google Maps Location History keeps track of all locations that a user has been to for up to the past month by using the maps data on the personal device. A trace is formed based on where the user has gone to. As long as the user is signed into their Google account and has this service enabled, they can go to the website to see where they have been. Pros to this is that no other device is needed, and it is easy to use. Cons for Google's location history is that service is needed to access the web which may not be feasible in the forests. Another potential con is privacy issue, since the data is stored for up to a month.
Figure 5.2.2.1 - Google Maps Location History
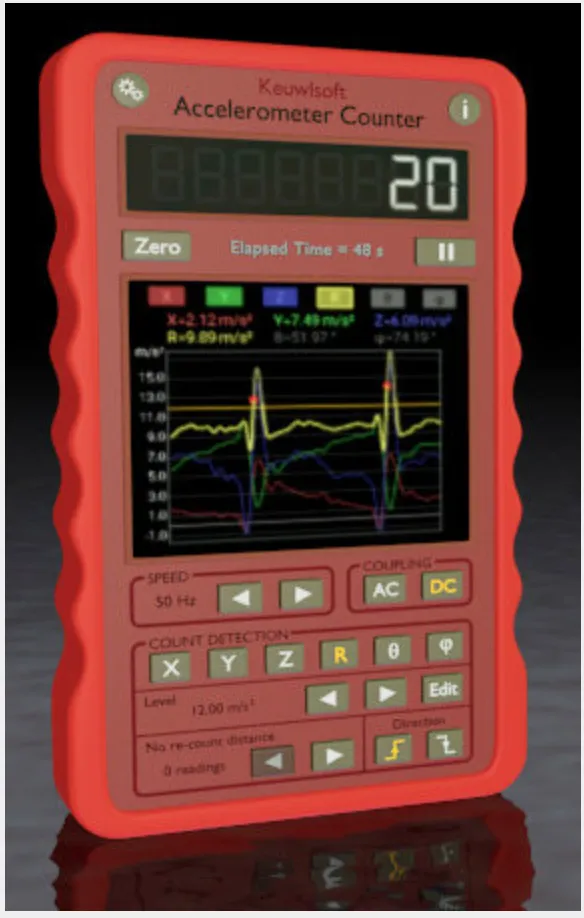
5.2.3 Accelerometer Counter Application:
This Accelerometer Counter is a downloadable application on ios and android. This application uses the devices built in accelerometer sensors to monitor when the device is rotated or shaked. When the set detection level is crossed, then the accelerometer counter is increased by one. Pros for this application is that it detects data based on user’s set settings, and also graphs the accelerometer input. Also no other device is needed besides the user’s phone. Cons to this for our goal is that the product fails to keep in memory this accelerometer data in order to play them back.
Figure 5.2.3.1 - Accelerometer Counter Application
5.3 Open Source Project Analysis:
Multiple college level projects exist with solutions that help reach a goal similar to our project. These projects are explained below.
5.3.1 Autonomous GPS Controlled Car:
At the University of Utah, a senior design group designed an autonomous car controlled using a GPS. The device requires user input of GPS defined waypoints and the vehicle will travel to these locations. The car can travel to on point, but can also have set multiple waypoints and knows where to pause and turn to go to the next location. The part of the project that stands out is that there is an option to have the car travel back and forth until further instruction is received, so once the last point is reached, the vehicle will visit the points in reverse order and back again until told otherwise. The pro to this project is the way the device can remember the steps it took and retrace. The disadvantage is that user input is needed with GPS which does not align with our need of not needing a GPS.
5.3.2 Autonomous Lane Following Car:
In 2022, a senior design group at UC Davis developed an autonomous lane following car. The vehicle uses sensors to detect two lines as the track to make sure it is always between the lines. During turns, the vehicle readjusts slightly as the space on the left and right changes to stay in the middle. Pros for this device is for obstacle detection for the vehicle, and making sure the vehicle can detect the space around to avoid collisions and collect data of the surroundings. Cons for this project is that the team had a premade track with tape so the vehicle can detect a certain color as the path. We would need to make the vehicle work without the set tape color.
5.3.3 Pedometer Watch:
Zoe’s Engineering, for her capstone project created a pedometer watch that counts steps. GPS was used to calculate the distance between steps and used the phone accelerometer for the calculations. Pros to this project is the use of the accelerometer to calculate how much movement is generated from the watch. For our project, the con is the use of the GPS for the distance, as this may cause GPS scrambling from the satellite.
6.0 Sources Cited:
“Accelerometer Counter,” Keuwl.com. [Online]. Available: https://www.keuwl.com/apps/035accelerometercounter/. [Accessed: 18-Jul-2022].
“Frequently asked questions,” GPS.gov: Frequently Asked Questions. [Online]. Available: https://www.gps.gov/support/faq/. [Accessed: 18-Jul-2022].
“Capstone project: Pedometer watch,” Zoe's Engineering. [Online]. Available: https://sites.google.com/a/charlottelatin.net/zoe-s-engineering/senior-engineering/capstone-project-pedometer-watch. [Accessed: 18-Jul-2022].
D. Yakovleva, “Alternatives to GPS: Location Tracking with GSM and WIFI,” Medium, 16-Dec-2020. [Online]. Available: https://medium.com/navixy/alternatives-to-gps-location-tracking-with-gsm-and-wifi-2a94f837296a#:~:text=LBS%20(Location%2Dbased%20services),a%20variety%20of%20different%20methods. [Accessed: 18-Jul-2022].
Garmin, “Garmin inReach® Mini 2: Satellite communicator: Messenger,” Garmin. [Online]. Available: https://www.garmin.com/en-US/p/765374. [Accessed: 18-Jul-2022].
Sawers, Paul. “Gita Is a $3,250 Personal Cargo Robot That Follows You Around.” VentureBeat, VentureBeat, 15 Oct. 2019, https://venturebeat.com/ai/gita-is-a-3250-personal-cargo-robot-that-follows-you-around/.
H. Vo , S. Thorup , B. Bradford, and B. McAllister, “Autonomous GPS Controlled Vehicle,” The University of Utah Engineering. [Online]. Available: https://my.eng.utah.edu/~cs4710/archive/2004/GPSCAR-final-prop.pdf. [Accessed: 18-Jul-2022].
K. Arrows, “What is google location history and should you use it or not?,” Appuals.com, 01-Mar-2021. [Online]. Available: https://appuals.com/what-is-google-location-history-stop-it-or-use-it/. [Accessed: 18-Jul-2022].
M. Lainez , “Senior Design: Autonomous Lane Following Car,” UC Davis Information and Educational Technology. [Online]. Available: https://video.ucdavis.edu/media/Senior+DesignA+Autonomous+Lane+Following+Car/1_s92k8o7i. [Accessed: 18-Jul-2022].
“Safe & Found,” SmokyMountains.com. [Online]. Available: https://smokymountains.com/safe-and-found/. [Accessed: 18-Jul-2022].
S. Zeng, “Sensor-aided vehicle positioning system,” 15-May-2018.
“The man who created GPS”. The Atlantic. 16-June-2014. [Online]. Available:
https://www.theatlantic.com/technology/archive/2014/06/the-man-who-created-gps/372846/
黄润芳, “Outdoor accurate positioning navigation method and device, electronic equipment and storage medium,” 10-May-2022.
万国强, “Vehicle positioning method and system,” 03-Apr-2020.
Appendix 1: Concept Sketch (Figure A.1)
Page of
[a]PSSC Buck converter, IMU interfacing, sensory